
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 | 31 |
- 3d
- 머신러닝
- nerf
- 딥러닝
- math
- SSL
- web
- nlp
- GAN
- Torch
- PRML
- ML
- Python
- CV
- dl
- FGVC
- Meta Learning
- REACT
- Vision
- cs
- FineGrained
- 자료구조
- classification
- algorithm
- pytorch
- 알고리즘
- computervision
- Depth estimation
- Front
- clean code
- Today
- Total
KalelPark's LAB
[ Computer Vision ] SAD(Sum of Absolute)란? 본문

SAD(Sum of Absolute)
Stereo Matching에서 기초적으로 사용하는 방법입니다., Depth Image를 생성하기 위해서, 가장 근본적인 문제는 "왼쪽 용상의 픽셀이 오른쪽 영상 픽셀의 어디와 유사한지 파악할 때 사용됩니다."
이때, 필요한 조건은 두대의 카메라의 광축 (Optical Axis)를 평행하게 해야 합니다. 이는 카메라의 Epipolar line과 두대의 카메라 base line과 평행하게 해야합니다.
(이러한 조건을 만족하지 못하면, Stereo Matching 문제는 2차원에서 해결해야되므로 상당히 시간소모가 많이 되어, 1차원 문제로 해결해야 합니다.)

먼저 픽셀과 픽셀을 비교하여, 차이를 계산하면 간단하게 픽셀간의 유사성을 측정하는 것이 가능합니다. 이는 해당하는 열의 Global Minimum을 찾는 문제로 연결됩니다. 좌/우 측 이미지 중 기준이 되는 영상에서의 한 점과 목표하고자 하는 영상의 시차 탐색 범위 내 존재하는 모든 픽셀에 대한 윈도우를 설정합니다. 좌측 윈도우 하나와 시차 탐색 범위 내 설정된 윈도우들 각각에 대해 절댓값 차이를 계산합니다.

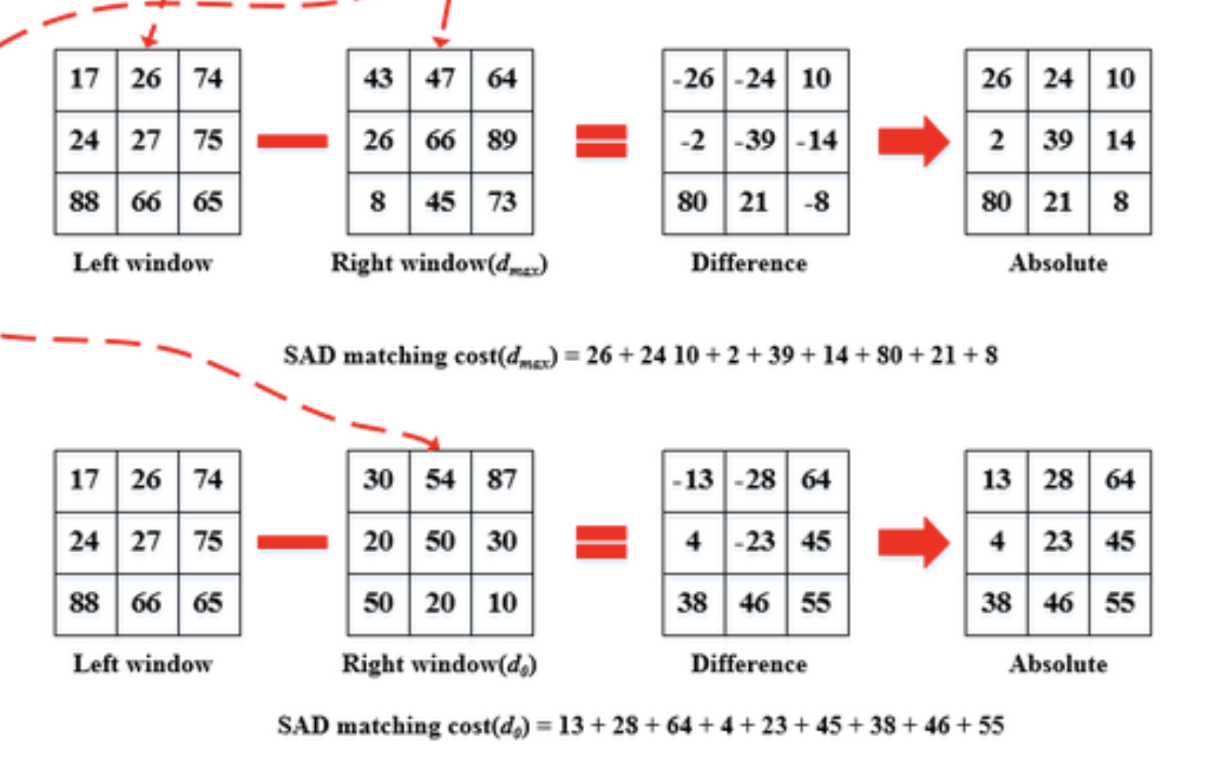
두 영상에서 최대로 발생하는 시차값(disparity)를 알고 있다고 가정하고, 이후, Stereo Matching을 수행합니다.
이때 최대 시차값을 적용하는 방법은 현재 왼쪽 영상의 픽셀에서 최대시차값만큼 탐색영역을 설정하고, Global Minimum을 구하는 것이 가능합니다.
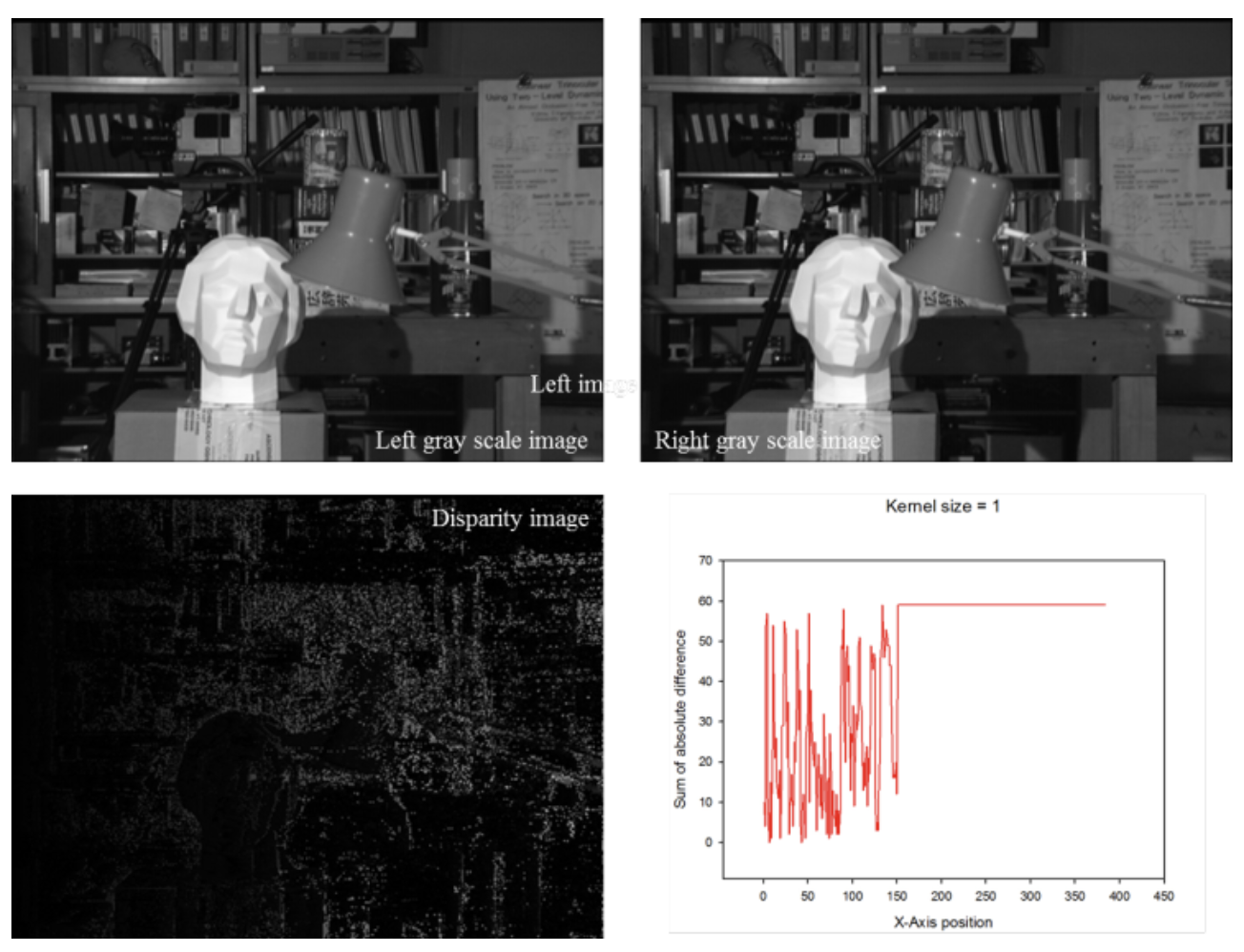

시차영상을 보면 이전방법보다 좋은 결과를 보여 준다. (밝을 수록 시차값이 크다. = 카메라와 거리가 가깝다) 하지만 여전히 부족한 결과이다. 아래의 사진은 일정한 크기의 커널을 적용하여, 스테레오 매칭을 수행한 결과 이다. 이때 SAD (Sum of absolute difference) 유사도 측정합니다.
Reference
https://m.blog.naver.com/dldlsrb45/220879732646
'Data Science > Common' 카테고리의 다른 글
| [ Computer Vision ] What's Neural Radiance Fields? (0) | 2023.05.05 |
|---|---|
| [ Computer Vision ] Unary Potential란? (0) | 2023.05.02 |
| [ Computer Vision ] 3D Vision과 관련된 여러 용어들 (0) | 2023.04.30 |
| [ Computer Vision ] Mono Depth Estimation이란? (0) | 2023.04.28 |
| [ Computer Vision ] 3D Reconstructure Survey (상시 업데이트) (0) | 2023.04.28 |



