
Recent Posts
Link
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | 31 |
Tags
- clean code
- CV
- pytorch
- PRML
- web
- nlp
- Depth estimation
- Meta Learning
- 딥러닝
- SSL
- cs
- 머신러닝
- rl
- Python
- nerf
- 자료구조
- ML
- 3d
- Front
- algorithm
- computervision
- Vision
- dl
- FineGrained
- FGVC
- 알고리즘
- classification
- math
- Torch
- REACT
- Today
- Total
KalelPark's LAB
[3DGS & 3R] 3R Metric 정리 본문

Absolute Trajectory Error (ATE)
- 추정된 카메라 경로와 실제 카메라 경로간의 절대적인 차이를 나타내는 지표
Relative Pose Error [Translation](RPE - Trans)
- 연속된 두 프레임 사이의 카메라 이동 추정 오차를 의미함
Relative Pose Error [Rotation](RPE - Rot)
- 연속된 두 프레임 사이의 카메라 회전 추정 오차를 의미함
Absolute Relative Error (Abs Rel) + Delta (픽셀 비율)
- 예측된 깊이와 실제 깊이 사이의 절대 상대 오차
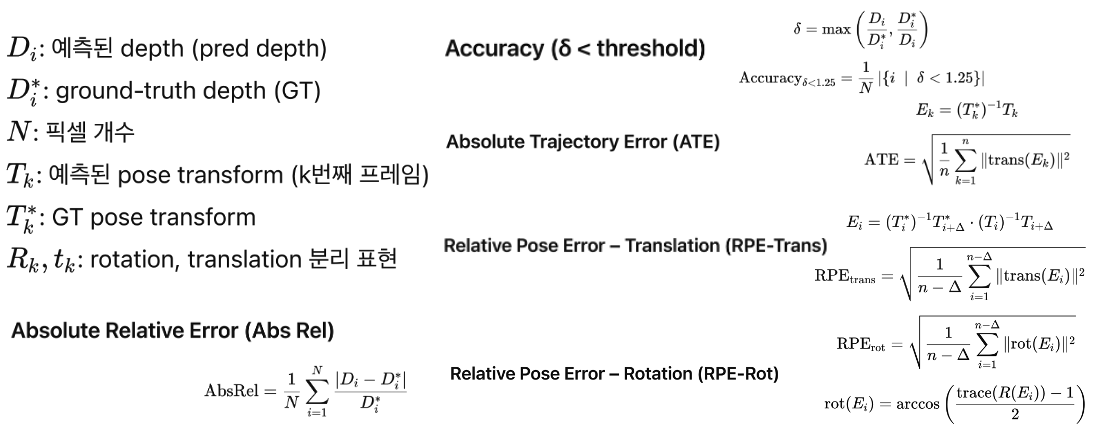
Accuracy (Acc)
- Reconstruction Point Cloud가 GT 표면 (Ground Truth mesh / Pcd ) 와 얼마나 가깝게 측정되는지 표현
Completeness (Comp)
- 연속된 두 프레임 사이의 카메라 이동 추정 오차를 의미함
Relative Pose Error [Rotation](RPE - Rot)
- 연속된 두 프레임 사이의 카메라 회전 추정 오차를 의미함
Absolute Relative Error (Abs Rel) + Delta (픽셀 비율)
- 예측된 깊이와 실제 깊이 사이의 절대 상대 오차

'Advanced 3D vision > 3DGS & 3R' 카테고리의 다른 글
'Advanced 3D vision/3DGS & 3R' Related Articles
more



Comments