
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
- Meta Learning
- Vision
- 딥러닝
- algorithm
- Depth estimation
- FGVC
- clean code
- web
- classification
- Front
- Torch
- pytorch
- PRML
- ML
- 3d
- 머신러닝
- 알고리즘
- FineGrained
- cs
- GAN
- math
- Python
- CV
- 자료구조
- SSL
- nlp
- computervision
- nerf
- REACT
- dl
- Today
- Total
KalelPark's LAB
[ Math ] chapter 2.1 [Image Formation] 본문

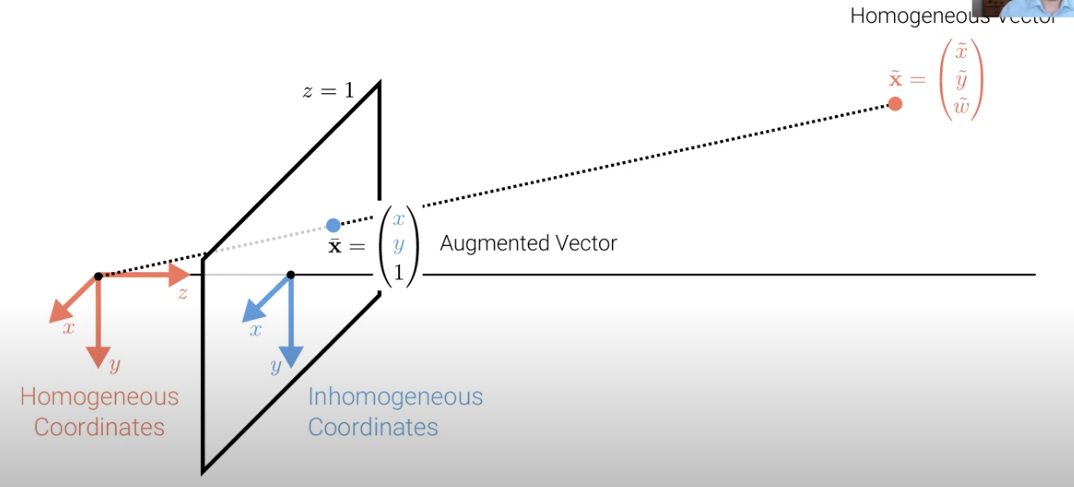
동치 좌표(homogeneous coordinates)
- 변환 등 어떤 목적을 위해 3차원 좌표를 한 치수 올리거나, 한 치수 내릴 때 사용하는 표현
(2차원 좌표를 3차원 좌표에 뿌려도 동일하다는 것)
= 동차 좌표계상 변환된 좌표 = 로컬 좌표계의 P * 월드 행렬 * 카메라 행렬 * 투영 행렬
- 동차 좌표계와 일반적인 3차원 좌표계의 관계
(x, y, z, w) = (x/w, y/w, z/w, 1) : 결국 3차원 좌표계도 w값이 1인 동차 좌표계
- 벡터를 포인트 혹은 벡터로 활용하기 위해서, 변환된 벡터를 3D 벡터의 동치벡터로 전환
Ref : https://m.blog.naver.com/jsjhahi/199987246
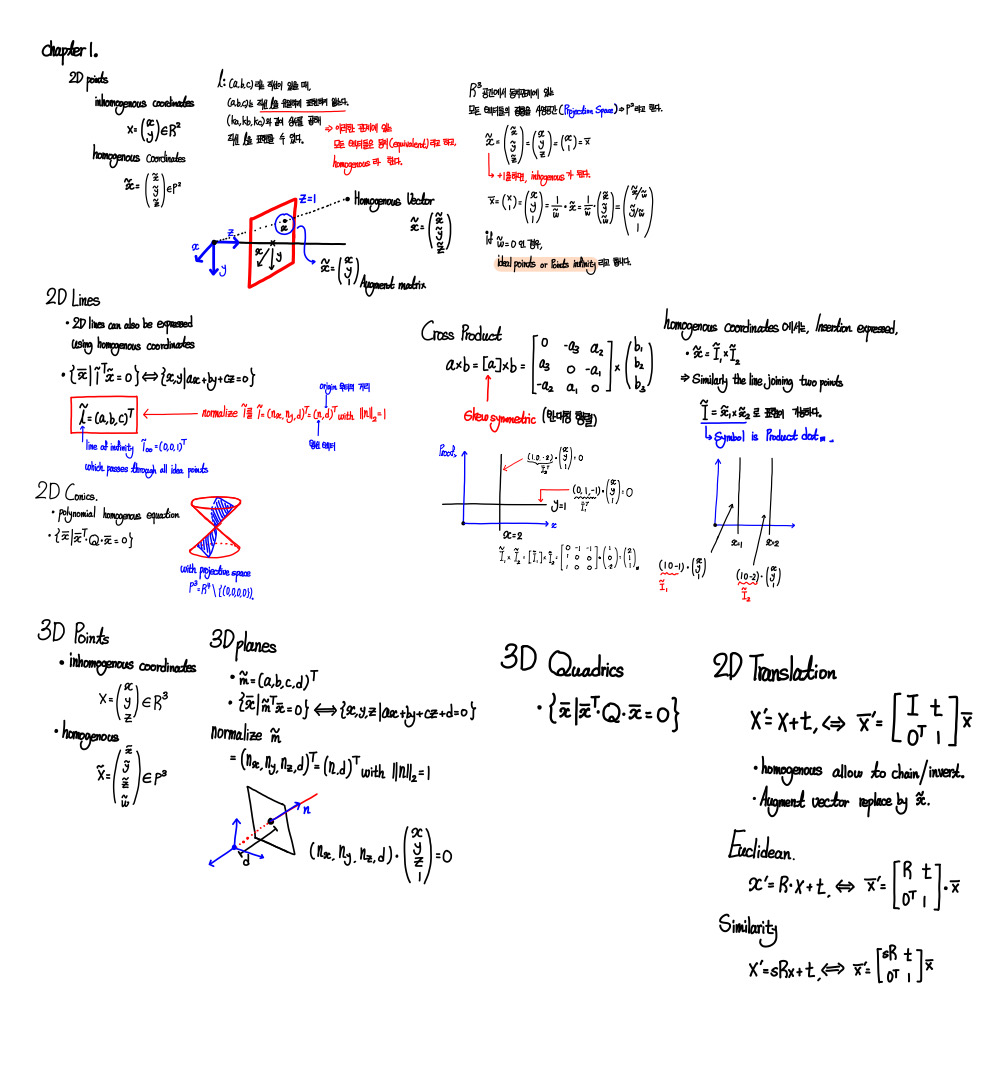
2D Lines

외적을 이용하여, 선분과 선분의 교차점 구하기 : https://bowbowbow.tistory.com/17
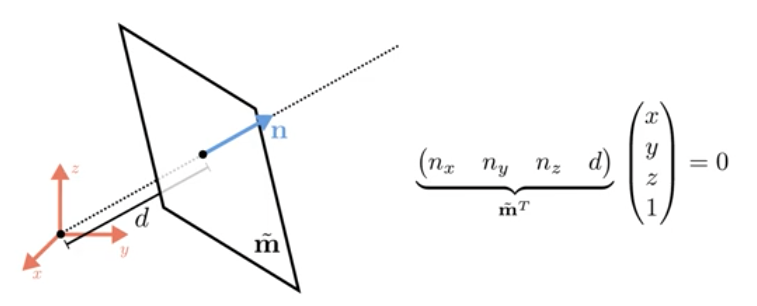
3D Planes , 3D Points
Reference
https://i-am-eden.tistory.com/56
[Tübingen ML] Computer Vision Lecture 정리
Universität Tübingen(튀빙겐 대학교)의 computer vision lecture를 공부하며 정리를 합니다 (Lecture 01은 제외). L01 - Introduction 1.1 Organization | 제외 1.2 Introduction | 제외 1.3 History of Computer Vision | 제외 L02 - Image Fo
i-am-eden.tistory.com
직선과 직선의 교차점 구하기
3차원 공간에서 두 직선사이의 교차점을 구해보자. 두 직선의 방정식을 다음과 같이 정의한다. 벡터 자기 자신과 외적을 하면 0벡터가 나온다는 사실을 이용하여 직선의 교점을 다음과 같이 구
wjdgh283.tistory.com
'Study > Math' 카테고리의 다른 글
| [Math] Camera Calibration이란? (0) | 2023.04.03 |
|---|---|
| [Math] chapter 2.2[Image Formation] (0) | 2023.03.26 |
| [ Math ] 모수추정(Parametric) 및 비모수적 추정(Nonparametric)란? (0) | 2023.02.06 |
| [ Math ] 최대우도(MLE), 나이브 베이즈(Naive Bayes)란? (0) | 2023.02.06 |
| [ Math ] ELBO란, 상호정보량이란? (0) | 2023.02.02 |



